高灵敏度柔性应变传感器是人工智能和可穿戴电子设备的关键装置。具体而言,本工作的目的是研究设计石墨烯-SiO
2球增强(GSB-enhanced)三维(3D)石墨烯泡沫(GSBF)电极结构,将其与柔性材料聚二甲基硅氧烷(PDMS)相结合,用于高灵敏度应变传感器。GSBF/PDMS应变传感器由于其独特的力学和导电性能,具有拉伸率为50%、响应时间小于128 ms及灵敏度高(应变系数GF = 103,应变变化范围为0-13%)等优异性能。此外,在没有显著阻力增量的情况下,其具有300多次加载-卸载循环的高稳定性。该传感器可用于多种可穿戴应用,包括监测手指运动、脉搏比、髌骨反射时膝关节的应变以及肘关节、手腕、脚掌等的运动。研究表明,机器人系统、医疗保健和灵活的电子应用领域的潜在能力,成本更低,更容易获得。
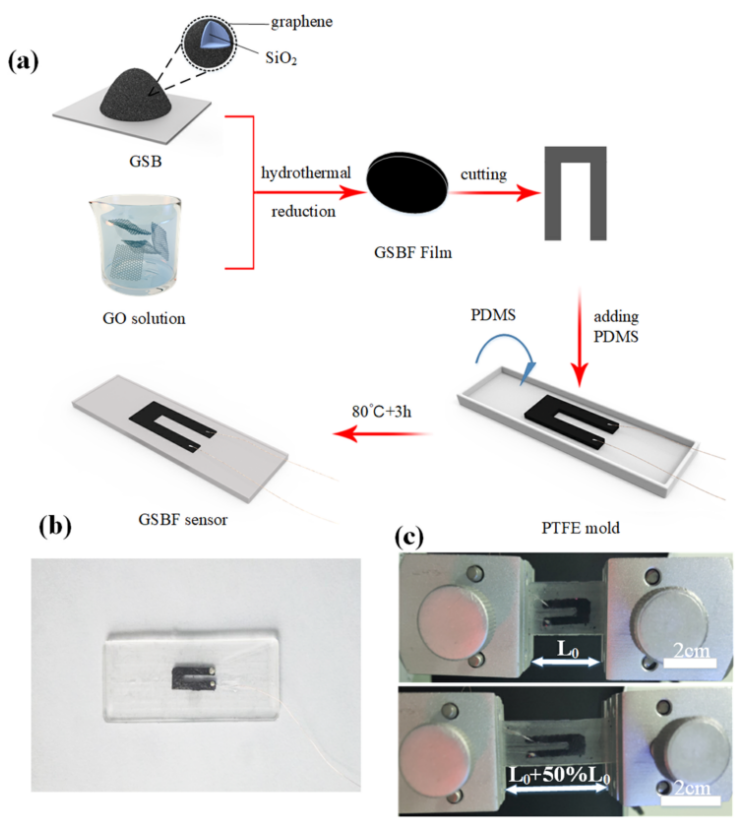
图1. (a) GSBF/PDMS柔性应变传感器制作工艺示意图,(b) GSBF/PDMS传感器照片,(c) GSBF/PDMS传感器拉伸50%的照片。
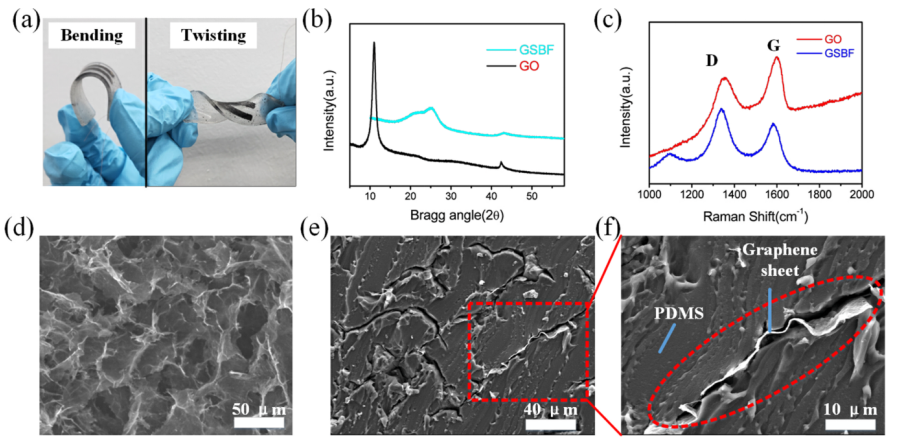
图2. (a) GSBF/PDMS应变传感器弯曲和扭转运动,(b) GO和GSBF的XRD谱图,(c) GO和GSBF的Raman谱图,(d) GSBF的SEM图,(e)和(f)复合材料不同放大率下断裂面的SEM图。
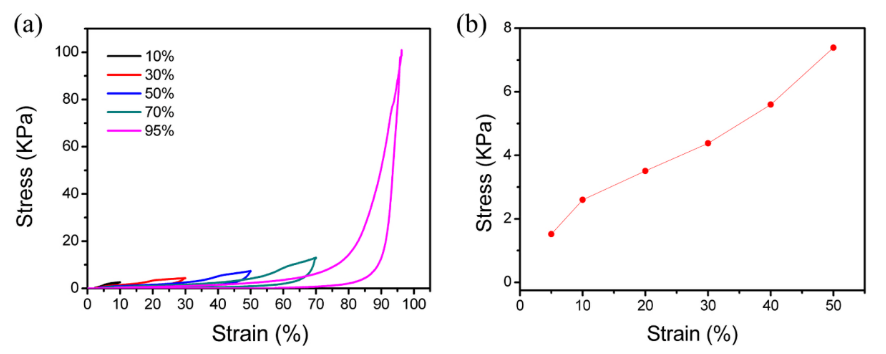
图3. (a)不同应变范围下GSBF复合材料的应力-应变曲线;(b) 5-50%应变时GSBF复合材料的应力-应变曲线
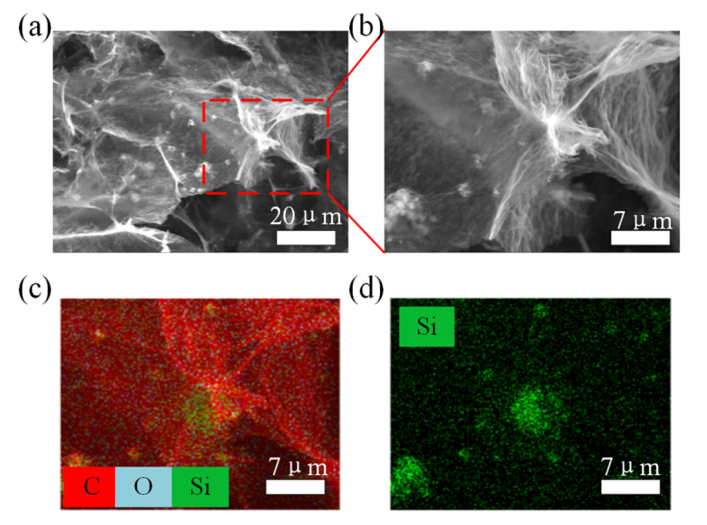
图4. (a)和(b) GSBF的SEM微观形貌,(c)和(d) GSBF元素对应的EDS映射图。
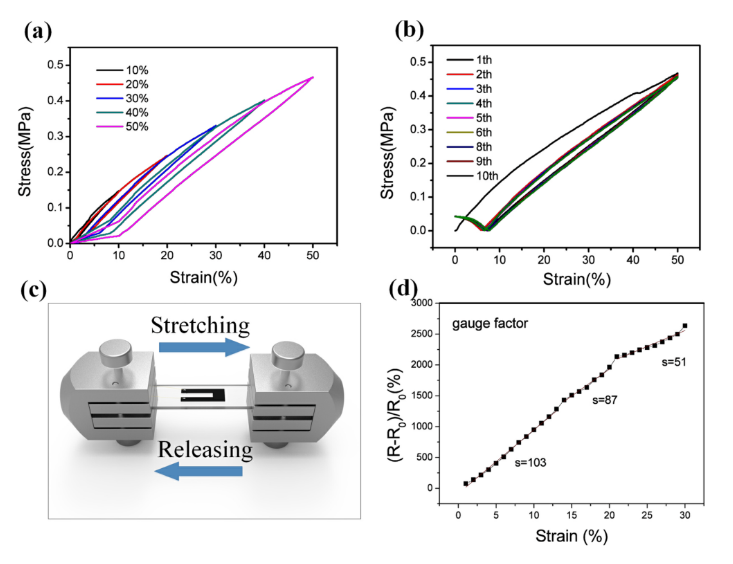
图5. (a)应变为10-50%时的应力-应变曲线,(b)应变为50%时GSBF/PDMS传感器10次循环的应力-应变曲线,(c)传感器测试照片,(d)电阻随应变的相对变化。
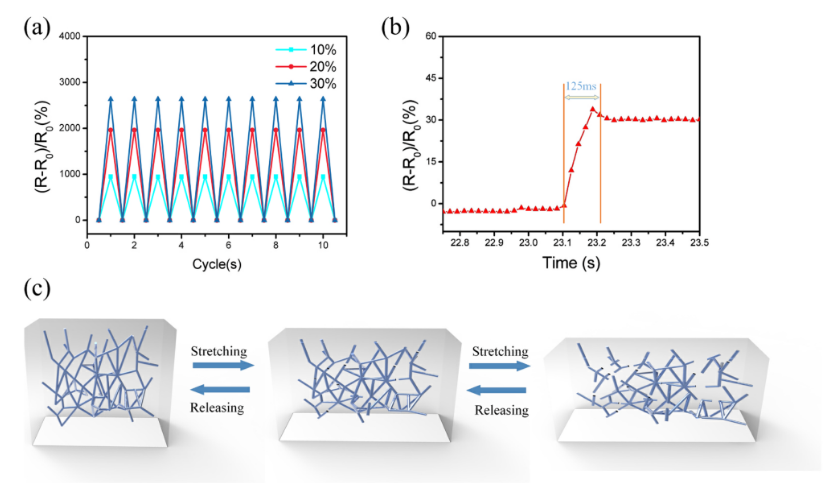
图6. (a)传感器在10%、20%、30%应变时的相对电阻变化,(b) GSBF应变传感器的响应时间,(c) GBSF应变传感器的工作机理。
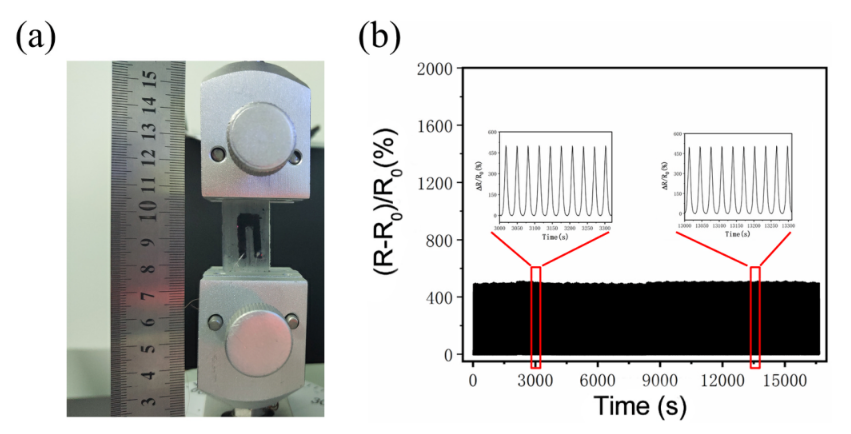
图7. (a)拉伸-松弛循环测试GSBF图像,(b)应变传感器300次拉伸-松弛循环响应曲线。
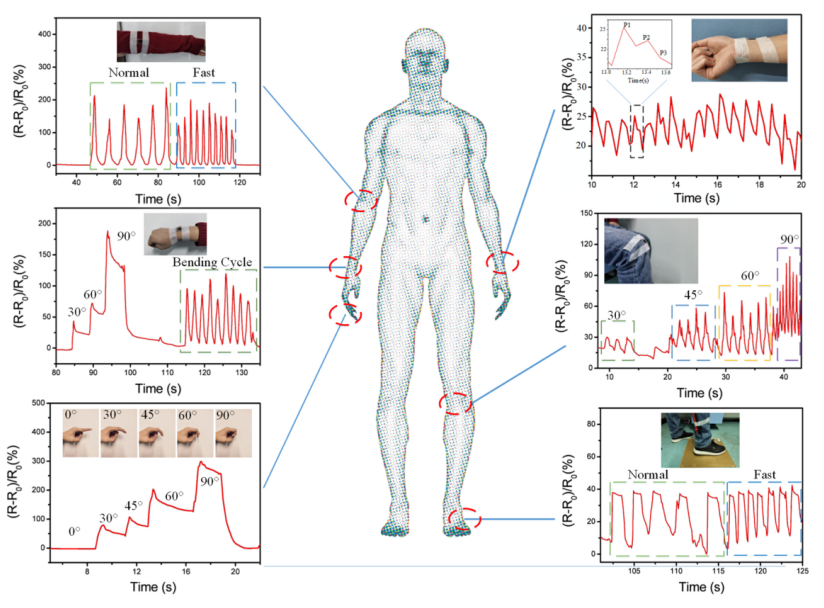
图8. 用于人体运动检测的GSBF/PDMS应变传感器。传感器附着在身体不同部位的相对电阻:(a)肘部,(b)手腕,(c)手指,(d)脉搏,(e)膝盖,(f)脚底。
相关研究成果由重庆大学、中国科学院大学重庆学院Chongsheng Yu等人于2022年发表在Physica E: Low-dimensional Systems and Nanostructures (https://doi.org/10.1016/j.physe.2022.115187)上。原文:Highly sensitive flexible strain sensor based on GSB-enhanced three-dimensional graphene composite。
转自《石墨烯研究》公众号