导电水凝胶是软电子产品开发中引人注目的材料。然而,它们的基本属性,如高灵敏度、优异的拉伸性和环境稳定性,很少在一种水凝胶中同时实现。在此,提出了一种受 Kirigami 启发的策略来提高有机水凝胶的敏感性,而不牺牲其机械拉伸性和环境稳定性。通过将海藻酸钠纳米纤丝和导电 MXene 纳米片引入甘油-水混合物渗透的聚合物双网络中,合成了具有多个互穿网络的有机水凝胶,具有显着的拉伸性(> 5000%)、良好的灵敏度和保水性(> 30 天)。 Kirigami 结构进一步应用于增强应变灵敏度,实现了 29.1 的应变系数,约为非结构化有机水凝胶的 5.5 倍。利用受剪纸启发的传感器,开发了一种耐用的手套,通过操作机械臂来抓取水下物体,展示了水下交互式人机界面。同时,通过将可穿戴传感器与机器学习算法相结合,开发了可穿戴莫尔斯电码智能识别该系统已得到演示,能够将莫尔斯电码符号实时转换为语音,具有卓越的识别精度(> 99%)和快速响应时间(约17毫秒)。这项工作提供了合成高灵敏度、可拉伸和极其耐受的有机水凝胶的新途径,为下一代软电子产品提供了一个有前景的平台。

Fig 1. 有机水凝胶和剪纸启发结构的制造示意图,以及所制造设备的性能。 a) PASNM-Gly有机水凝胶的材料组成和合成。 b) 受剪纸启发的 PASNM-Gly 有机水凝胶结构。 c) Kirigami结构的有机水凝胶的性能演示。
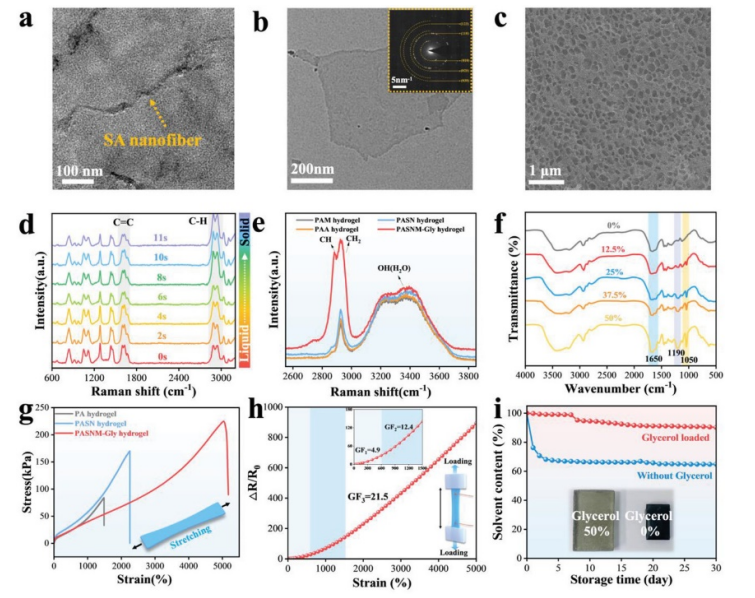
Fig 2. 材料的形貌和结构,以及水凝胶的性能测试。 a) 稀释后组装的 NaCl/SA 水溶液中 SA 纳米纤丝的 TEM 图像(C
SA = 0.97 wt%,C
NaCl = 1.75 wt%)。 b) Ti
3C
2T
X 纳米薄片的 TEM 图像。插图是相应的 SAED 模式。 c) PASNM-Gly水凝胶的微观结构。 d)光固化过程中PASNM-Gly水凝胶的拉曼光谱。 e)不同成分水凝胶的拉曼光谱。 f) P(AM-AMPS-Na)水凝胶的FTIR光谱。 g) 不同水凝胶系统的力学测试曲线。 h) 非结构化 PASNM-Gly 水凝胶的规格因子。 i) 含有和不含甘油的水凝胶中溶剂含量变化的比较。
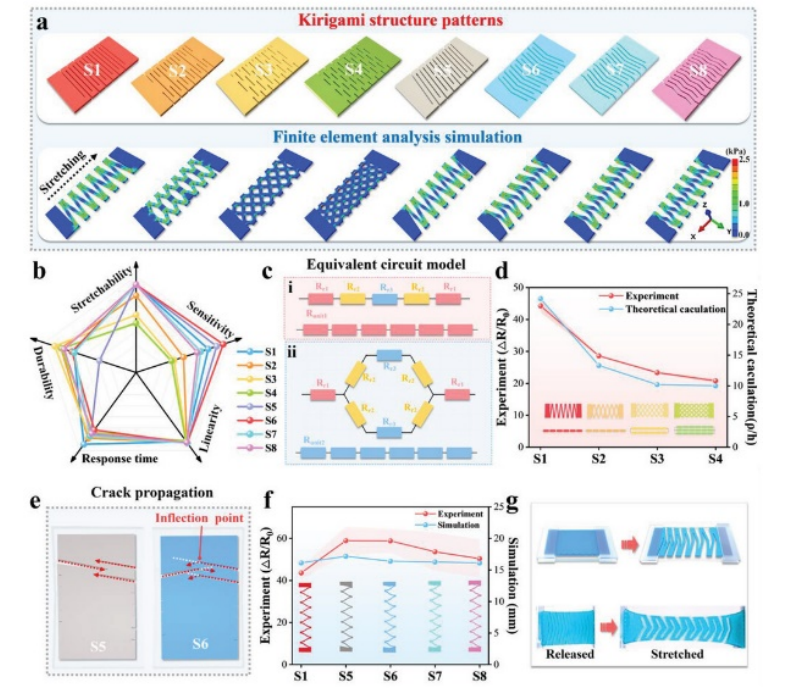
Fig 3. 受剪纸启发的有机水凝胶的结构设计。 a) 八种剪纸结构示意图及其变形过程中的有限元分析。 b)具有不同Kirigami结构的水凝胶传感器的性能。 c)由单元电阻构成的有机水凝胶(结构S1和S2)的等效电路。 d)剪纸结构S1、S2、S3和S4的理论电阻值和实验结果。 e) 结构S5和S6的裂纹扩展示意图。 f) Kirigami 结构 S1、S5、S6、S7 和 S8 的有限元分析和实验结果。g) Kirigami结构的有机水凝胶拉伸前后的示意图(上)和照片(下)。

Fig 4. Kirigami 结构水凝胶传感器的应变传感能力。 a) 相对电阻-应变曲线。 b) 应力-应变分布模拟结果。 c) 响应和恢复时间。 d) 应变为 150% 时机电响应与时间的关系。 e) 应变为110%时不同频率下的相对电阻变化。 f) 0.05 Hz 频率下 5 次循环拉伸期间的相对电阻变化。 g) 1000次连续拉伸-释放循环的机械耐久性测试。 h) 该工作 Kirigami 结构水凝胶传感器与文献中报道的传感器的比较(在最大 GF、拉伸性和环境稳定性方面)。

Fig 5. 运动控制应用。 a) 系统组成及原理图。 b) 传感器位置及相应运动控制示意图。 c) (b) 中传感器的电阻变化。 d) 机械臂抓取水下物体时的运动。 e) 控制机械臂的夹具抓取水下物体的序列图像。
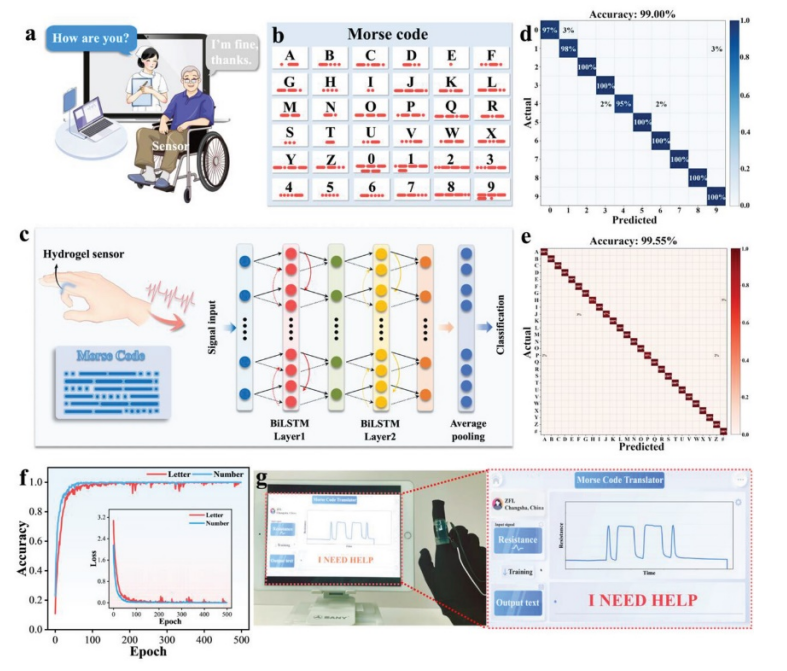
Fig 6. 可穿戴莫尔斯电码识别和翻译系统的应用。 a)基于水凝胶传感器的莫尔斯电码翻译系统的潜在应用场景示意图。 b) 摩尔斯电码表,包括26个字母和10个数字。 c) BiLSTM模型的结构。d,e) 分别识别 10 个数字和 26 个字母的混淆图。 f) 分别识别10个数字和26个字母的准确率曲线和损失曲线。 g) 穿戴式摩尔斯电码智能翻译系统演示,将“我需要帮助”的摩尔斯电码信号转换为语音,并实时显示在应用界面上。
相关研究工作由湖南大学Huigao Duan课题组于2023年在线发表在《ADVANCED FUNCTIONAL MATERIALS》期刊上,原文:Kirigami-Inspired 3D-Printable MXene Organohydrogels for Soft Electronics。
https://doi.org/10.1002/adfm.202308487
转自《石墨烯研究》公众号