模拟人类皮肤三个基本功能(感知、保护和体温调节)的电子皮肤(e-skin)的发展对于人机界面和智能机器人具有巨大的潜力。然而,现有的研究主要集中在感知上。这项研究提出了一种新的,生态友好的,机械坚固的电子皮肤,复制人类皮肤的三个基本功能。电子皮肤由Ti3C2Tx MXene、聚吡咯和细菌纤维素纳米纤维组成,其中MXene纳米片形成基质,细菌纤维素纳米纤维充当填料,聚吡咯充当导电“交联剂”。这种设计允许定制电导率、微结构和机械性能,集成传感(感知)、EMI屏蔽(保护)和热管理(温度调节)。最佳的电子皮肤可以有效地感应各种运动(包括微小的动脉脉冲),在78微米厚度下实现63.32 dB的EMI屏蔽效率,并在2.4 V下在30秒内将温度调节至129℃,展示了其在复杂场景下智能机器人的潜力。
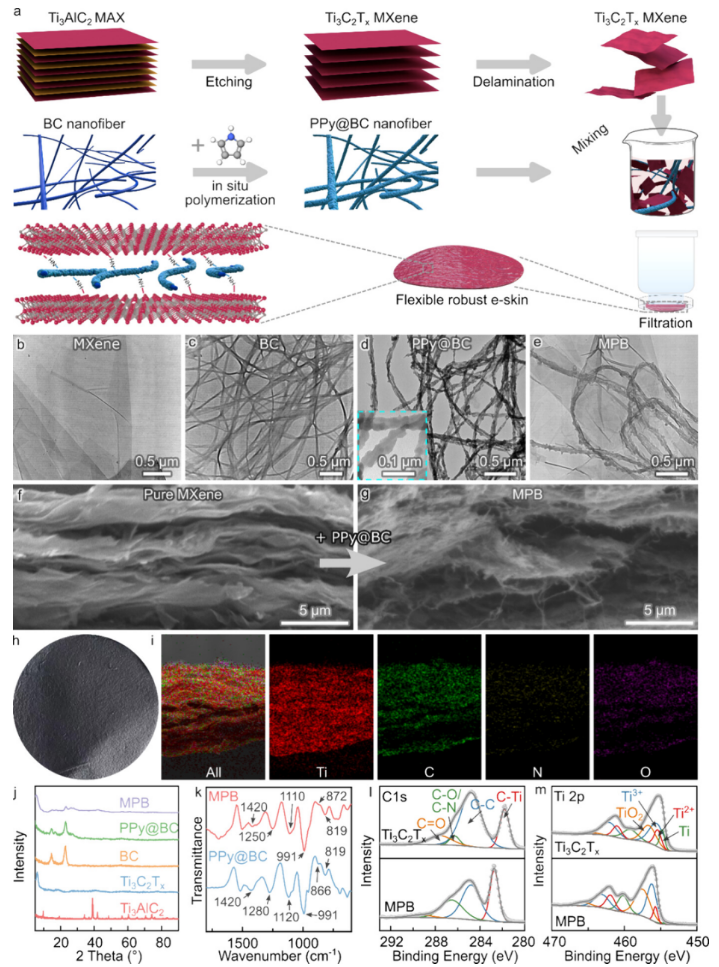
图 1. (a)电子皮肤准备过程的示意图。(b–e)ti 3c 2 tx MXene(b)、细菌纤维素(c)、PPy@BC (d)和MPB e-skin (e)的TEM图像。插图(d):公元前PPy的放大图。(f–g)MXene(f)和MPB e-skin (g)的SEM图像。(h)MPB电子皮肤胶片的光学图像。(I)电子皮肤横截面的EDS分析。(j)ti 3 ALC 2 MAX、Ti3C2Tx MXene、BC、PPy@BC和MX/PPy@BC e-skin的XRD图案。(k)PPy @ BC和MPB e-skin的FTIR光谱。Ti3C2Tx MXene和MPB e-skin的(l,m) C 1s (l)和Ti 2p (m)高分辨XPS谱。MPB-2用于收集图(j)至(m)所示的数据。
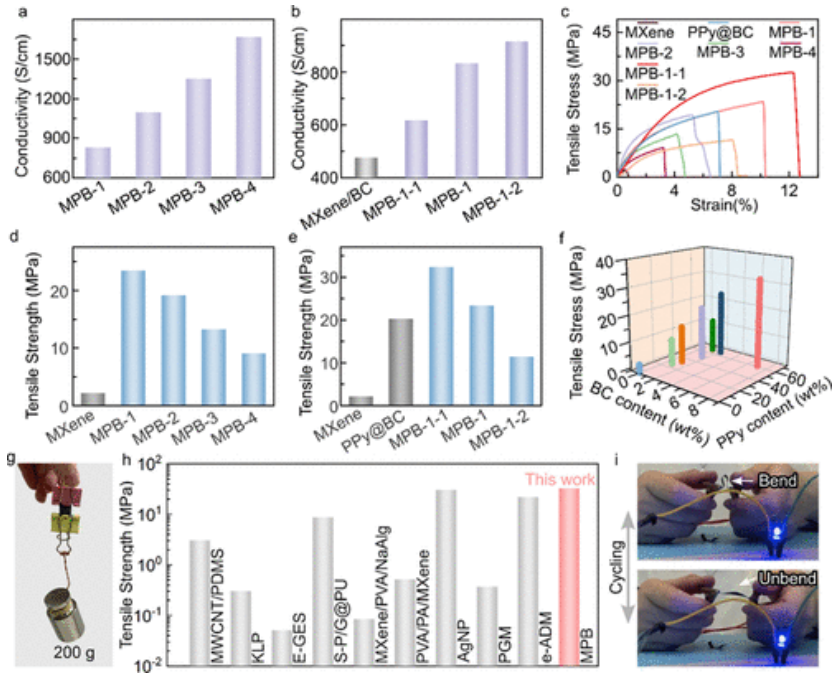
图 2. (a)具有不同MXene比例的不同电子表皮的电导率。(b)具有不同PPy比例的不同电子皮肤的电导率。(c)不同电子皮肤和对照的应力-应变曲线。(d)具有不同MXene比例和对照的不同电子皮的拉伸强度。(e)具有不同PPy比例和控制的不同电子皮肤的拉伸强度。(f)说明拉伸强度、PPy重量%和BC重量%之间关系的3D图。(g)展示电子皮肤在200克重量下的机械强度的光学图像。(h)本研究中的电子皮肤与其他报道的电子皮肤材料的拉伸强度比较。b、d和e部分中的灰色数据点对应于相应的对照。(I)通过在循环弯曲测试期间点亮一个商业LED来展示电子皮肤的导电性和柔韧性的光学图像。
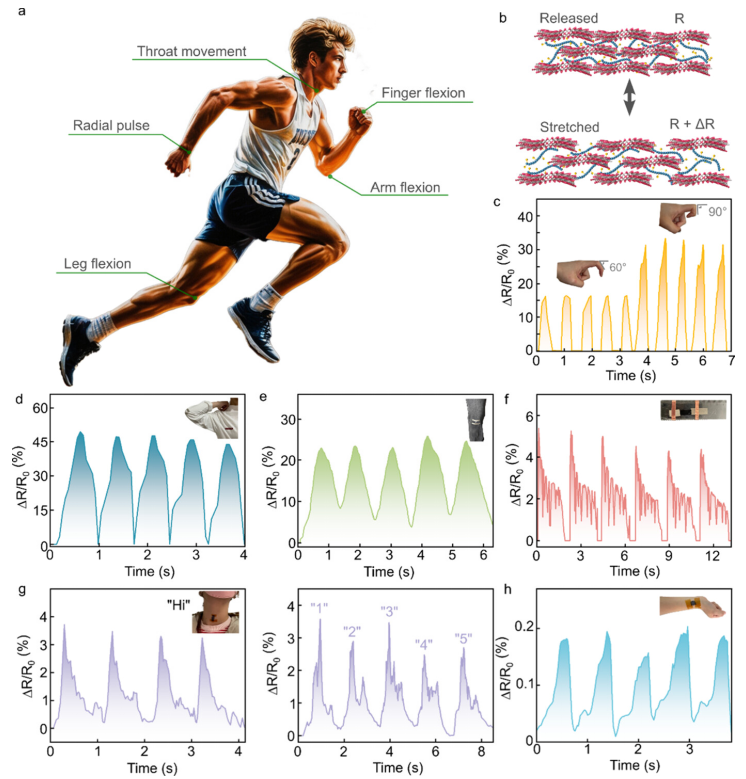
图3. (a)说明了电子皮肤在监测不同长度尺度的不同人体运动方面的多功能性。(b)描述电子皮肤传感机制的示意图。(c–h)分别在手指弯曲、手臂弯曲、腿部弯曲、尺子振动、说“嗨”和“1”到“5”时喉部肌肉运动以及手腕脉搏检测期间,电子皮肤中的实时电阻变化。
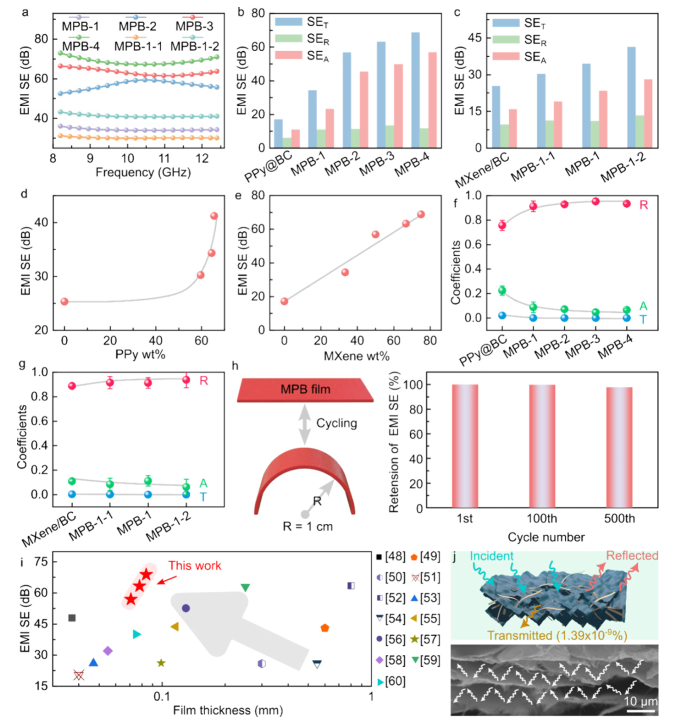
图 4. (a)电子皮肤的电磁干扰屏蔽效率。(b,c)电子皮肤的EMI集、SEA和SER。(d) EMI SE作为电子外壳中PPy重量%的函数。(e) EMI SE作为电子皮肤电导率的函数。(f,g)不同电子皮肤的反射(R)、透射(T)和吸收(A)的功率系数。(h)经过循环弯曲试验(曲率半径:1 cm)后,电子蒙皮的EMI SE。(I)e-skins与其他MXene基EMI屏蔽膜的电磁屏蔽性能的比较。红色的星星,从下到上,分别对应于样品MPB-2到MPB-4。箭头表示在EMI屏蔽材料中优选高EMI SE和低薄膜厚度。(j)电子皮肤的电磁屏蔽机制。c–g中的灰色实线是眼睛的向导。
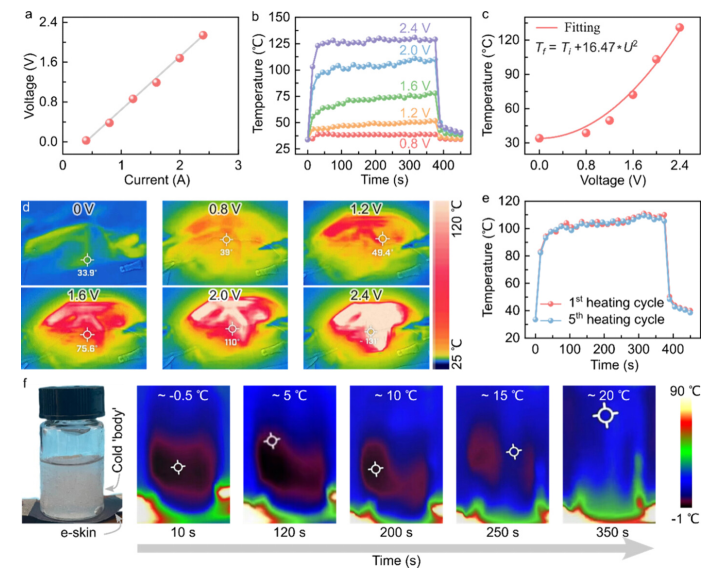
图 5. (a)说明电子皮肤电气特性的电流-电压曲线。(b)电子皮肤在不同驱动电压下的温度响应。(c)描绘作为施加电压的函数的电子皮肤的温度的图。基于焦耳定律拟合了实验数据点(红色实线),揭示了e-皮肤温度和电压的平方之间的比例关系。(d)红外(IR)图像,捕捉不同驱动电压下电子皮肤的饱和温度。(e)在2 V的恒定驱动电压下,电子皮肤的循环加热性能。(f)电子皮肤调节“身体”温度(冷水)能力的演示。光学图像(左侧)显示了与“身体”接触的电子皮肤,红外图像(右侧)描绘了在1.8 V驱动电压下“身体”温度的时间演变。
相关科研成果由同济大学Wei Lu,Bin Yuan,Xiang Li等人于2024年发表在Nano Letters(https://doi.org/10.1021/acs.nanolett.4c02583)上。原文:Robust and Environmentally Friendly MXene-Based Electronic Skin Enabling the Three Essential Functions of Natural Skin: Perception, Protection, and Thermoregulation
原文链接:https://doi.org/10.1021/acs.nanolett.4c02583
转自《石墨烯研究》公众号