高性能柔性触觉传感器在人机交互领域受到广泛关注。然而,在宽负载范围内高效制造具有高灵敏度响应的传感器仍然是一个挑战。在这里,本研究提出了一种一步激光写入路线,以构建独特的多层压阻结构,由掺杂铜纳米颗粒的石墨烯突起和周围的多孔铜片组成。这种多层结构使组装的触觉传感器在低压(0-200 kPa时1468 kPa
- 1)和高压(600-800 kPa时1345 kPa
- 1)刺激下都能表现出卓越的灵敏度。并对其增强压阻传感的机理进行了研究。可编程激光书写过程促进了识别诸如滑动、点击和按压等多维手势的人机交互设备的开发。这一进步有助于促进高性能交互式传感技术的发展。

图1. LICG传感器的制备与表征。(a)制作过程的图示。(b-d)复合结构的SEM图像显示表面突出和间隙。(e)多尺度结构示意图。(f, g) Cu和C分布的XRD图和EDS图。(h) CPI和Cu/LIG突出的拉曼光谱。(i)与所建议的传感器在0至1200千帕压力下的电流信号。
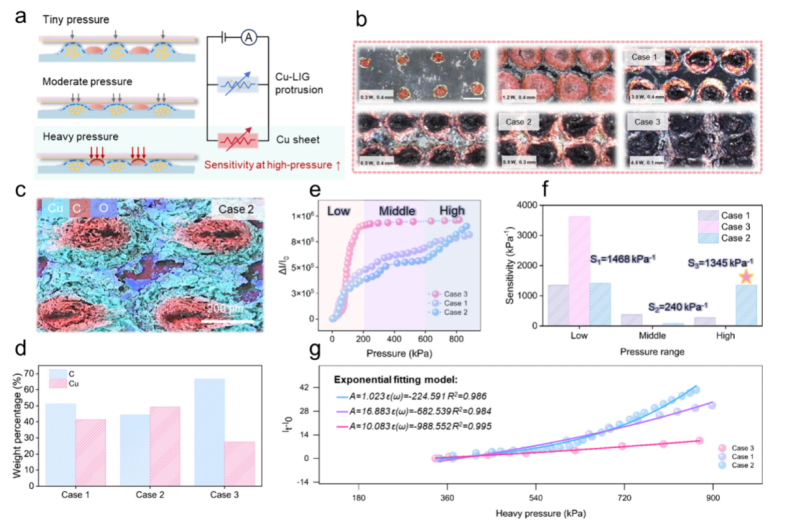
图2. 传感机理及传感层参数优化。(a)拟议结构的感应机制模型。(b)光学显微镜下表面结构图(比例尺:200 μm)。(c, d)不同情况下的分布和相对Cu含量。(e、f) 0 ~ 800kpa压力范围内不同情况下的电流信号及灵敏度。(g)不同情况下的电流与压力拟合结果。
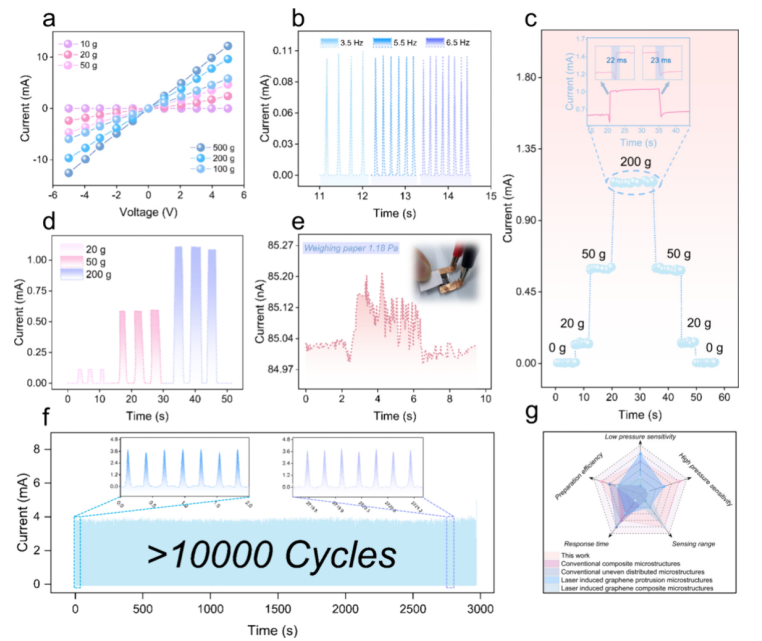
图3. LICG传感器的传感特性。(a)不同权重下的传感器电流-电压曲线。(b)传感器在不同频率下的电流响应。(c)不同重量(0 - 200g)下的传感器电流响应以及200g下的响应和恢复时间。(d)三个重复负载下不同重量下的电流响应。(e)演示与感应称重纸样品有关的检测极限(1.18 Pa)。(f)超过10,000个周期的传感器重复性测试。(g)本研究中传感器与传统复合结构和基于LIG微结构的传感器性能的雷达制图。

图4. 生理信号监测传感器。(a)用于保健监测的重要生理信号。检测(b)手指脉搏,(c)呼吸频率,(d)吞咽,(e)手指弯曲,(f)阅读,(g)肘部运动,(h)走、跑、跳三种不同的运动状态。
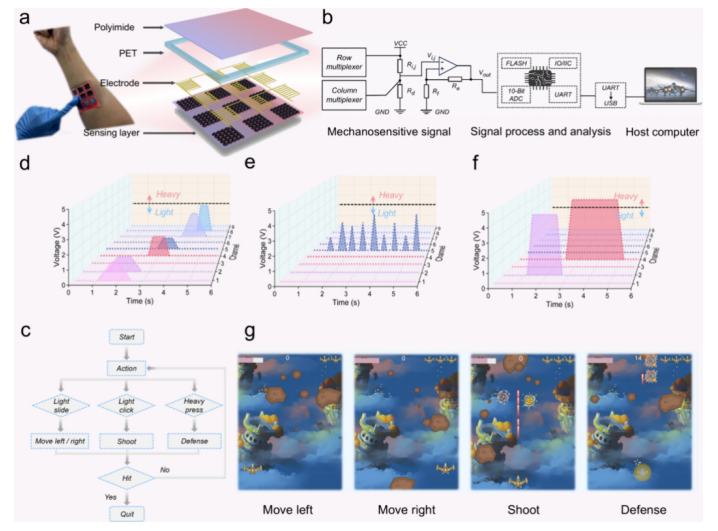
图5. 用于人机交互应用的传感器阵列。(a)传感器阵列的图像和爆炸视图表示。(b)“飞机战争”系统的示意图。(c)游戏传感器控制流程图。(d-f)不同触摸模式对应的传感器阵列电流响应。(g)传感器阵列对上位机显示的不同触摸方式的响应。
相关研究成果由苏州大学
Xingwen Zhou、
Hao Shen和Liguo Chen课题组2024年发表在
ACS Applied Materials & Interfaces (链接:https://doi.org/10.1021/acsami.4c15827)上。原文:
Multilevel Cu-LIG Tactile Sensing Arrays for 3D Touch Human–Machine Interaction
转自《石墨烯研究》公众号