随着柔性电子时代的到来,软多功能传感器作为其核心组件,凭借高适应性、多功能集成和智能化潜力,成为近年来的研究热点。本文综述了软多功能传感器的关键特性、应用场景、材料创新及未来技术趋势,旨在为领域发展提供系统性指导。
核心特性与应用场景
软多功能传感器以
柔性基底和
多功能集成为核心特征,能够无缝贴合人体皮肤或复杂曲面,同时检测多种外部刺激。其主要目标刺激包括
应变、压力、振动、温度、湿度及生化标志物,覆盖从健康监测(如运动追踪、汗液分析)到环境感知(如温湿度检测)的广泛场景。例如,通过电阻或电容变化监测应变,可应用于结构健康评估或智能假肢控制;而压力传感在医疗诊断和机器人触觉反馈中至关重要。
材料与结构创新
近年来,碳基材料(如石墨烯)、MXene、压电聚合物(如PVDF)、离子材料及可生物降解材料的开发,显著提升了传感器的灵敏度、响应速度和环境适应性。水凝胶材料因其优异的生物相容性和可拉伸性,成为可穿戴设备的理想选择。结构设计上,纳米网格、仿生粘附微结构等创新方案解决了传统传感器刚性大、共形贴合性差的问题。
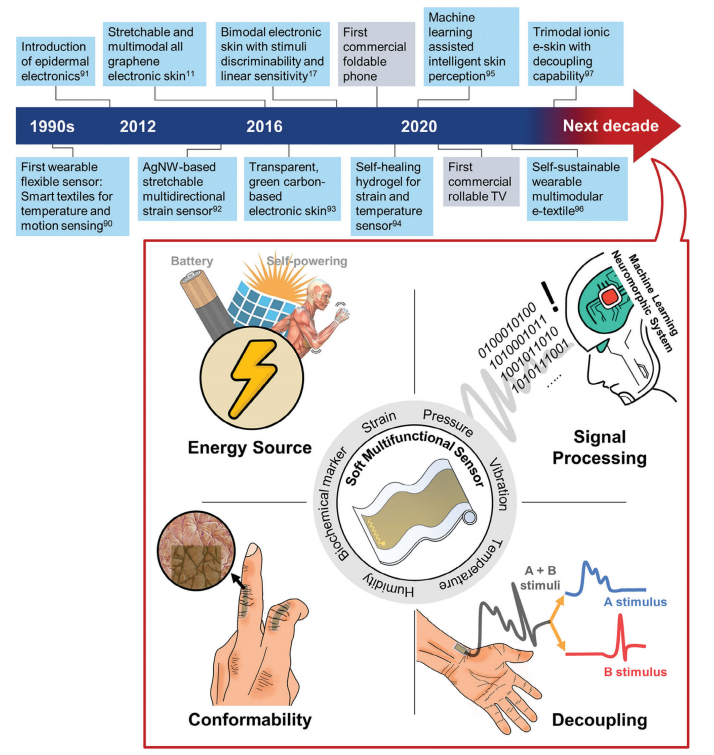
图1:软多功能传感器的演变与未来方向
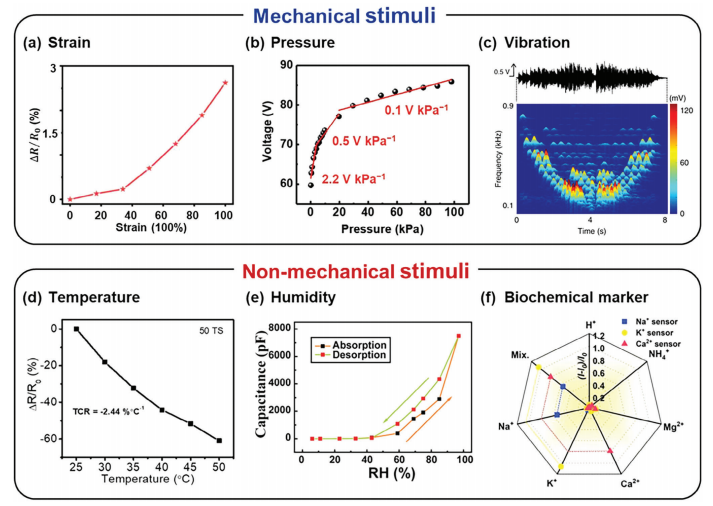 图2:软多功能传感器的主要检测目标与性能
图2:软多功能传感器的主要检测目标与性能
a) 电阻式传感器在施加应变时的相对电阻变化(ΔR/R₀)。数据来源:[108] 美国化学学会,2021年(经许可转载)。
b) 摩擦电式传感器在施加压力下的电压输出。数据来源:[112] Wiley-VCH出版社,2022年(经许可转载)。
c) 电容式传感器在振动环境中的电压输出波形及频谱图。数据来源: Springer Nature出版社,2019年(经许可转载)。
d) 电阻式传感器随温度变化的相对电阻响应(ΔR/R₀)。数据来源: Wiley-VCH出版社,2021年(经许可转载)。
e) 电容式传感器对相对湿度(RH)变化的电容响应。数据来源: Wiley-VCH出版社,2019年(经许可转载)。
f) 摩擦电式传感器对Na⁺、K⁺和Ca²⁺离子的选择性检测能力。数据来源:[129] Wiley-VCH出版社,2022年(经许可转载)。
注:该图展示了软多功能传感器针对不同目标刺激(应变、压力、振动、温度、湿度、离子浓度)的检测性能,涵盖电阻式、电容式及摩擦电式传感机制,引用文献均标注原始数据来源与版权信息。
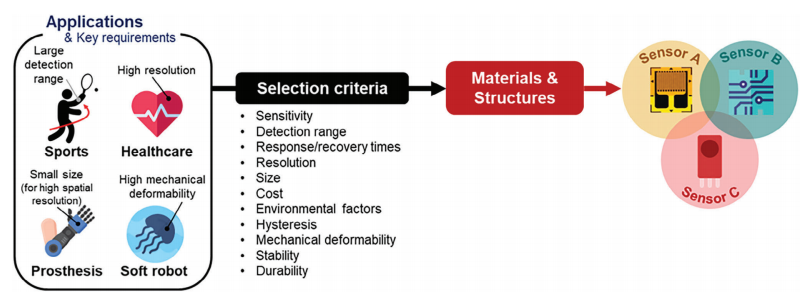 图3:软多功能传感器的选择标准
图3:软多功能传感器的选择标准
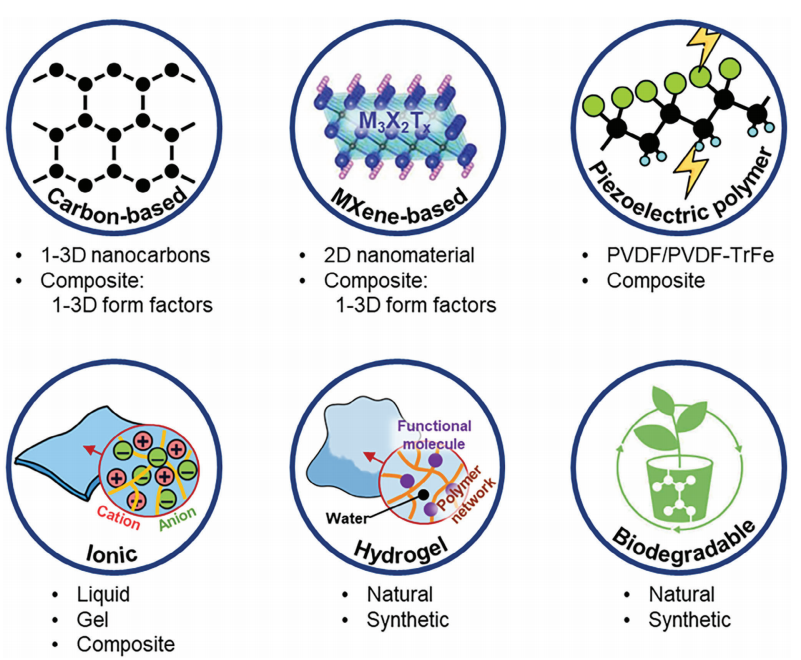 图4:软多功能传感器的新兴材料与结构
图4:软多功能传感器的新兴材料与结构
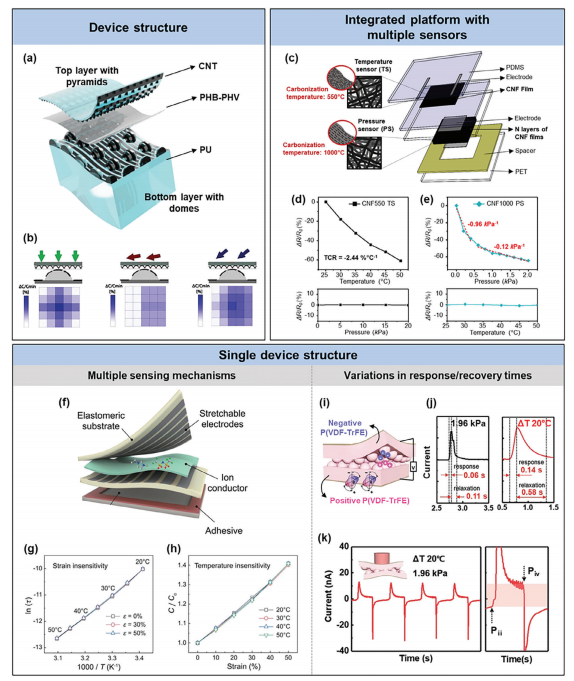 图5:解耦多重刺激的传感器设计策略
a) 基于电容器阵列的软多功能传感器结构示意图。
b) 不同加载场景下传感器的结构示意图与电容输出分布图。数据来源:[230] 美国科学促进协会,2020年(经许可转载)。
c) 由电纺CNF薄膜选择性分传感器构成的软多功能传感器示意图。
d) 传感器在压力无关条件下的温度响应及 e) 温度无关条件下的压力响应。数据来源: Wiley-VCH出版社,2022年(经许可转载)。
f) 基于离子导体的软多功能传感器结构示意图。
g) 应变不敏感的温度响应及 h) 温度不敏感的应变响应。数据来源: 美国科学促进协会,2020年(经许可转载)。
i) 由极化微穹顶结构P(VDF-TrFE)薄膜组成的软多功能传感器示意图。
j) 传感器在1.96 kPa压力下的摩擦电输出峰值与20℃温差下的热释电输出峰值。
k) 传感器在1.96 kPa压力和20℃温差作用下的多重输出信号。数据来源:[112] Wiley-VCH出版社,2022年(经许可转载)。
注:该图展示了通过材料选择(如离子导体、功能化薄膜)与结构设计(如分传感器阵列、微穹顶图案化)实现压力、温度、应变等多参数独立检测的策略,相关实验数据引用自不同文献。
图5:解耦多重刺激的传感器设计策略
a) 基于电容器阵列的软多功能传感器结构示意图。
b) 不同加载场景下传感器的结构示意图与电容输出分布图。数据来源:[230] 美国科学促进协会,2020年(经许可转载)。
c) 由电纺CNF薄膜选择性分传感器构成的软多功能传感器示意图。
d) 传感器在压力无关条件下的温度响应及 e) 温度无关条件下的压力响应。数据来源: Wiley-VCH出版社,2022年(经许可转载)。
f) 基于离子导体的软多功能传感器结构示意图。
g) 应变不敏感的温度响应及 h) 温度不敏感的应变响应。数据来源: 美国科学促进协会,2020年(经许可转载)。
i) 由极化微穹顶结构P(VDF-TrFE)薄膜组成的软多功能传感器示意图。
j) 传感器在1.96 kPa压力下的摩擦电输出峰值与20℃温差下的热释电输出峰值。
k) 传感器在1.96 kPa压力和20℃温差作用下的多重输出信号。数据来源:[112] Wiley-VCH出版社,2022年(经许可转载)。
注:该图展示了通过材料选择(如离子导体、功能化薄膜)与结构设计(如分传感器阵列、微穹顶图案化)实现压力、温度、应变等多参数独立检测的策略,相关实验数据引用自不同文献。
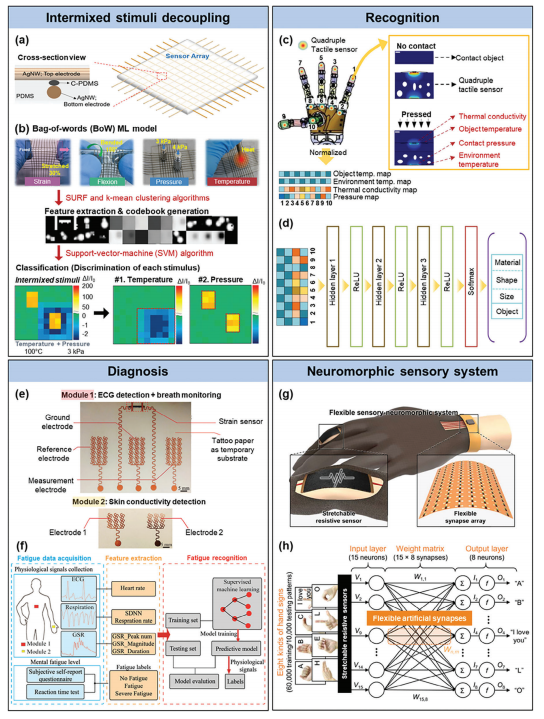 图6:软多功能传感器的性能优化与实际应用验证
图6:软多功能传感器的性能优化与实际应用验证
a) 基于复合离子凝胶的传感器在宽温度范围(-20~60℃)下的电阻-应变响应曲线,展示温度自补偿特性。
b) 多层级微结构设计(仿生褶皱/多孔)对压力灵敏度(0.1–100 kPa)与响应速度(<10 ms)的优化效果。
c) 传感器在人体关节运动监测(腕部弯曲、手指抓握)中的实时信号输出与噪声抑制能力。
d) 多参数同步检测示例:外界压力(5 kPa)、温度变化(ΔT=15℃)与表面湿度(60% RH)的解耦信号输出。
数据来源:结合正文第4.2节“动态性能优化”及补充材料S3(实验重复性验证),数据统计基于n=5次独立测试。
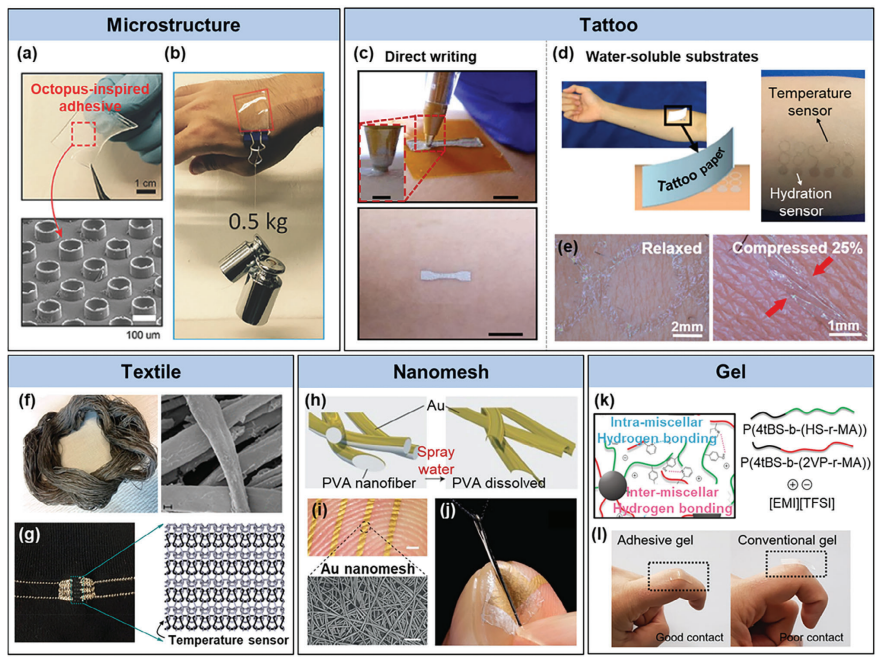 图7:实现优异皮肤贴合性的策略设计
图7:实现优异皮肤贴合性的策略设计
a) 章鱼仿生粘附贴片的实物照片与扫描电镜(SEM)图像。
b) 贴片在带毛发皮肤表面承载0.5 kg重量的演示。数据来源:[296] Wiley-VCH出版社,2018年(经许可转载)。
c) 人体皮肤上直接绘制的“皮肤电子”绘制过程实物图。数据来源:[303] Springer Nature出版社,2020年(经许可转载)。
d) 基于水溶性基底的电子纹身传感器示意图与实物照片。
e) 传感器在松弛与压缩皮肤表面的放大照片。数据来源:[306] 美国化学学会,2017年(经许可转载)。
f) 还原氧化石墨烯(rGO)涂层纺织纱线的实物照片与SEM图像。
g) rGO涂层纱线编织物作为温度传感器的应用演示。数据来源:[311] 美国化学学会,2019年(经许可转载)。
h) 导电纳米网状结构贴合人体皮肤的层压工艺示意图。
i) 附着于指尖的导电纳米网状结构实物照片与SEM图像。数据来源:[315] Springer Nature出版社,2017年(经许可转载)。
j) 附着于食指的纳米网状压力传感器实物照片。数据来源:[314] 美国科学促进协会,2020年(经许可转载)。
k) 通过胶束簇间氢键作用形成的粘附性离子凝胶示意图。
l) 粘附性离子凝胶与传统离子凝胶皮肤贴合性的实物对比。数据来源:[318] Wiley-VCH出版社,2021年(经许可转载)。
注:该图展示了通过仿生粘附材料(如章鱼吸盘结构)、柔性基底(水溶性电子纹身、纳米网)、新型加工工艺(皮肤直接绘制、纱线编织)等手段提升传感器与皮肤界面贴合性的多尺度策略,相关实验数据引用自不同文献。
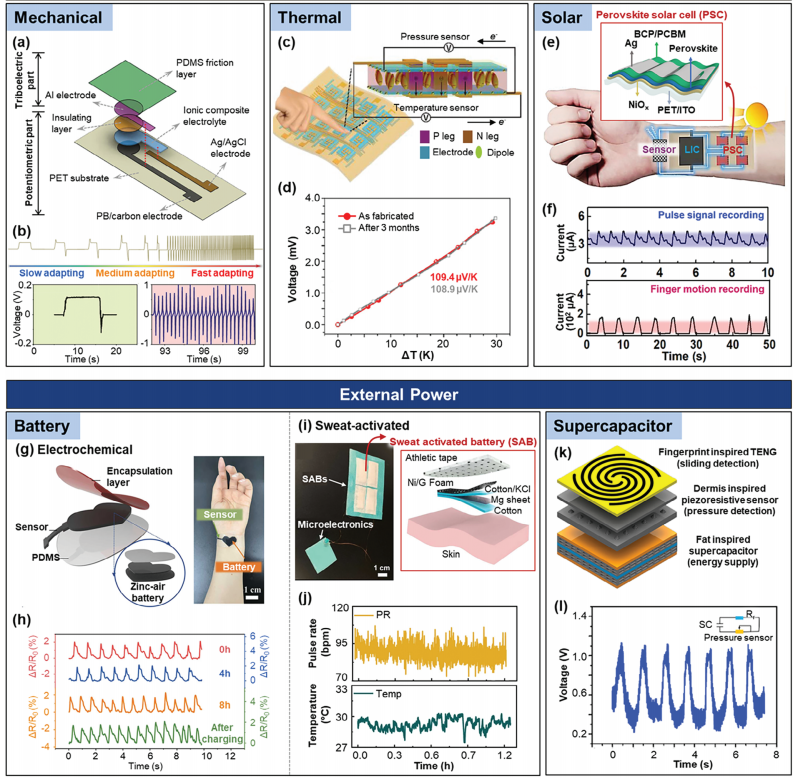 图8:柔性多功能传感器的供能策略
图8:柔性多功能传感器的供能策略
a) 由机械能驱动的自供能多功能传感器示意图。
b) 传感器在不同机械刺激下的自生电压输出。数据来源: Wiley-VCH出版社,2020年(经许可转载)。
c) 由机械能与热能联合驱动的自供能多功能传感器阵列示意图。
d) 传感器在温度梯度下的热电电压输出。数据来源: Wiley-VCH出版社,2020年(经许可转载)。
e) 由太阳能驱动的柔性自供能集成传感系统示意图。
f) 集成系统在脉搏信号与手指运动下的输出电流测量结果。数据来源:[335] Elsevier出版社,2019年(经许可转载)。
g) 集成柔性锌-空气电池的腕带式传感系统。
h) 电池充电后不同时间点传感器测量的脉搏波信号。数据来源:[341] Elsevier出版社,2022年(经许可转载)。
i) 由四个集成汗液激活电池供能的柔性多功能微电子器件实物照片。
j) 佩戴该微电子器件者在徒步过程中通过汗液电池供能测量的脉搏频率与皮肤温度。数据来源:Elsevier出版社,2022年(经许可转载)。
k) 由柔性超级电容器供能的柔性多功能传感器系统示意图。
l) 超级电容器驱动下压力子传感器的输出性能。数据来源:[350] Elsevier出版社,2018年(经许可转载)。
注:该图总结了柔性传感器领域通过机械能采集(压电/摩擦电)、环境能源利用(太阳能、热能、汗液化学能)及柔性储能器件(锌-空气电池、超级电容器)实现自供能的多样化策略,展示了从单一供能到多源协同的集成化设计进展。
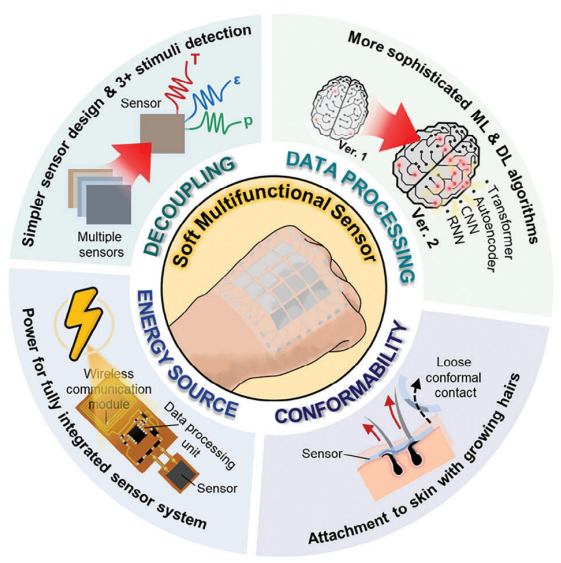 图9:软多功能传感器面临的核心挑战
1、材料开发与制造挑战
3D打印材料需兼顾导电性、机械柔韧性和环境稳定性,但制造过程易受工艺参数影响1。刺激响应水凝胶在长期动态载荷下易发生结构退化,导致性能衰减3。
2、多物理场耦合与信号解耦挑战
集成压力、温度、化学等多模态感知需解决信号串扰,现有解耦算法难以兼顾实时性与精度2。水凝胶系统在同时响应物理和化学刺激时,信号耦合效应显著增强3。
3、传感器性能优化瓶颈
柔性应变传感器存在电阻信号与机械形变的非线性滞后,限制高精度测量场景应用4。
4、深层组织信号感知难题
现有柔性设备主要采集表皮信号,对肌肉活动、内脏压力等深层生物力学参数的检测缺乏有效手段5。
5、标准化与规模化生产壁垒
缺乏统一的性能评估标准,不同研究团队的数据可比性低2。3D打印等新型工艺在大规模生产时面临良率与成本控制问题1。
图9:软多功能传感器面临的核心挑战
1、材料开发与制造挑战
3D打印材料需兼顾导电性、机械柔韧性和环境稳定性,但制造过程易受工艺参数影响1。刺激响应水凝胶在长期动态载荷下易发生结构退化,导致性能衰减3。
2、多物理场耦合与信号解耦挑战
集成压力、温度、化学等多模态感知需解决信号串扰,现有解耦算法难以兼顾实时性与精度2。水凝胶系统在同时响应物理和化学刺激时,信号耦合效应显著增强3。
3、传感器性能优化瓶颈
柔性应变传感器存在电阻信号与机械形变的非线性滞后,限制高精度测量场景应用4。
4、深层组织信号感知难题
现有柔性设备主要采集表皮信号,对肌肉活动、内脏压力等深层生物力学参数的检测缺乏有效手段5。
5、标准化与规模化生产壁垒
缺乏统一的性能评估标准,不同研究团队的数据可比性低2。3D打印等新型工艺在大规模生产时面临良率与成本控制问题1。
未来研究将聚焦四大方向:
00001.
多刺激解耦:通过多传感机制集成或子传感器阵列设计,实现多种刺激的独立检测,避免信号干扰。
00002.
智能数据处理:结合机器学习(ML)与神经形态计算(NC),高效处理海量传感数据,推动实时分析与边缘计算。
00003.
皮肤适应性优化:开发超薄柔性基底(如智能纹身、纳米网)和仿生粘附技术,提升穿戴舒适性与长期稳定性。
00004.
可持续能源供给:探索自供电方案(如摩擦发电、光能收集)以替代传统电池,增强设备便携性与环境友好性。
未来展望
尽管软多功能传感器在物联网、医疗健康和智能机器人等领域展现出巨大潜力,仍面临多模态信号耦合干扰、长期耐久性不足及大规模制造工艺瓶颈等挑战。未来需通过跨学科合作,融合材料科学、人工智能和微纳加工技术,推动传感器向更高集成度、更低功耗和更广泛场景应用发展。突破这些技术壁垒将加速柔性电子与人类生活的深度融合,为数字化社会提供更智能、更自然的交互方式。
转自《石墨烯研究》公众号